©STAR Dresden e.V.
– ist der zweite Rover von STAR Dresden für die die ERC – die European Rover Challenge.
Die Challenge
Die ERC ist ein internationaler Wettbewerb welcher jährlich in Polen stattfindet – dieses Jahr vom 9. bis 12. September in Kielce auf dem Campus der „Politechnika Świętokrzyska w Kielcach“. Teams aus der ganzen Welt haben die Möglichkeit, ihren Rover in vier verschiedenen Aufgaben – Science, Maintenance, Navigation und Probing– auf dem so genannten Mars-Yard zu testen. Auf ca. 1500 m² wird jedes Jahr eine andere Region des Mars wiedergegeben. Die Aufgaben sind nicht aus der Luft gegriffen, sondern basieren auf internationalen Plänen für die Weltraumrobotik und die bodengebundene Exploration.
Die ERC ist ein internationaler Wettbewerb welcher jährlich in Polen stattfindet – dieses Jahr vom 9. bis 12. September in Kielce auf dem Campus der „Politechnika Świętokrzyska w Kielcach“. Teams aus der ganzen Welt haben die Möglichkeit ihren Rover in vier verschiedenen Aufgaben – Science, Maintenace, Navigation und Probing – auf dem so genannten Mars-Yard zu testen. Auf ca. 1500 m² wird jedes Jahr eine andere Region des Mars wiedergegeben. Die Aufgaben sind nicht aus der Luft gegriffen, sondern basieren auf internationalen Plänen für die Weltraumrobotik und die bodengebundene Exploration. Auf diese Weise spiegelt der Wettbewerb die gleichen Anforderungen wieder, denen sich die „echten“ Rover stellen müssen. Im Rahmen der ERC findet außerdem jedes Jahr eine Messe statt, auf der sich Gruppen, Universitäten und Unternehmen präsentieren können und der internationale sowie interdisziplinäre Austausch gefördert wird. Neben dem wissenschaftlichen und wettbewerbsorientierten Charakter zeichnet sich die ERC auch durch ein enorm freundschaftliches Umfeld aus, in dem Menschen aus teilweise sehr unterschiedlichen Regionen der Welt zusammenkommen, Spaß haben, sich gegenseitig helfen und Freundschaften schließen. Das Ziel, den besten Rover zu bauen, wird dabei natürlich nicht vernachlässigt!
Die Aufgaben
Navigation
Beim Navigation-Task soll der Rover autonom – also ohne Kommunikation mit der Bodenstation – einen Weg über den Mars-Yard zu vorher festgelegten Zielkoordinaten finden und diesen anschließend befahren. Neben dem
anspruchsvollen Terrain verkompliziert auch die Vorgabe, dass kein Global Navigation Satellite System (GNSS) genutzt werden darf. Daher sind GPS-Empfänger nicht erlaubt. Die aktuelle Position muss daher aus dem bisher gefahrenen Weg und der visuellen Akquisition des umgebenen Terrains bestimmt werden.


Probing / Soil Sample Collection
Die nächste Aufgabe beinhaltet das Verteilen von Messsonden an zuvor festgelegten Punkten. Die Messsonden werden in einem Halter mitgeführt und sollen autonom abgelegt werden. Nachdem dem Aussetzen der Bodenproben geht der Rover zum Sammeln von Bodenproben über. Mit einer Schaufel wird Oberflächenmaterial an unterschiedlichen Stellen gesammelt, in einer speziellen Transportbox ableget und gewogen.

Science
In dieser Aufgabe gilt es eine zuvor aufgestellte Hypothese zu verifizieren oder zu widerlegen. Die Hypothese ist durch das Team aufzustellen und behandelt geologische oder biologische Aussagen die sich durch Fotos des Mars Yard untersuchen lassen. Neben den geplanten Wissenschaftsaspekten können auch unerwartete Dinge während der Fahrt über den Mars gefunden werden.



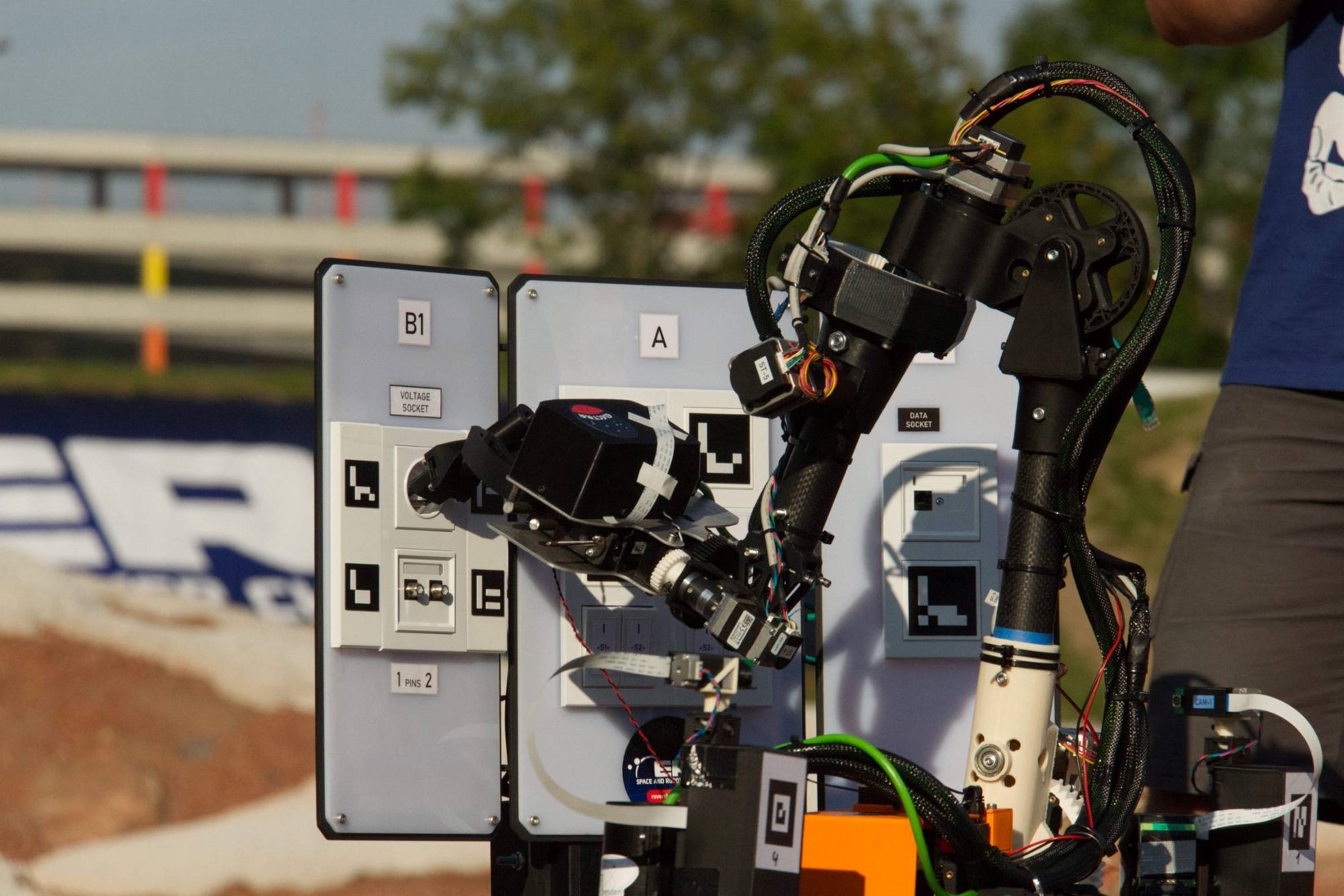
Maintenance
In dieser Aufgabe kommt der robotische Arm zur vollen Geltung. Unterschiedliche Schalter gilt es zu betätigen, Stecker müssen in die passenden Buchsen und eine Spannung soll gemessen werden.

MEROPE
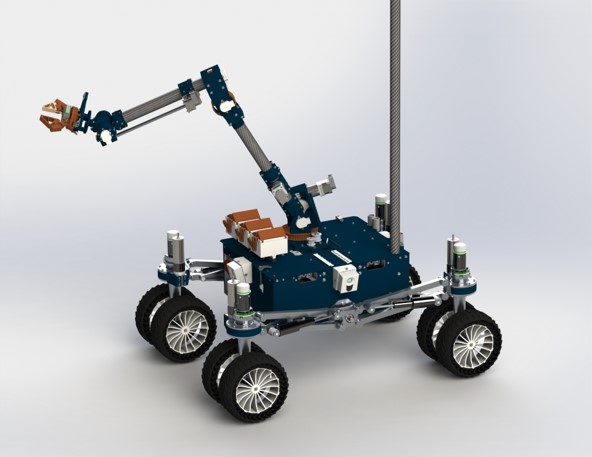
Mit den Erfahrungen aus dem letztjährigen Wettbewerb und einem sehr guten fünften Platz von über 60 teilnehmenden Teams hoffen wir, dieses Jahr einen noch besseren Rover zu bauen.
Das Projekt MEROPE schließt direkt an ELECTRA an und verspricht mit mehr Studierenden, mehr Erfahrung und mehr Ambitionen dies auch zu erreichen.
Aktuell befindet sich das Projekt in der Fertigungsphase. Das heißt, dass alle Berechnungen, Planungen und Designaktivitäten abgeschlossen sind und die Bauteile bestellt werden.
Unsere Sponsoren
