
STAR auf dem 5. Symposium on Space Educational Activities
Vom 8. bis zum 10. April 2026 war die TU München Gastgeberin des 5. Symposium on Space Educational Activities (SSEA) der ESA. Die internationale Konferenz bot Studierenden, Forschenden und Raumfahrtinitiativen eine Plattform zum fachlichen Austausch über aktuelle Projekte und Entwicklungen im Bereich der akademischen Raumfahrt. Im Rahmen der Veranstaltung konnte STAR Dresden die eigene Arbeit an einem Stand präsentieren und neue Kontakte innerhalb der studentischen Raumfahrtszene knüpfen. An der Konferenz nahmen über 500 Personen teil, darunter viele Studierende.
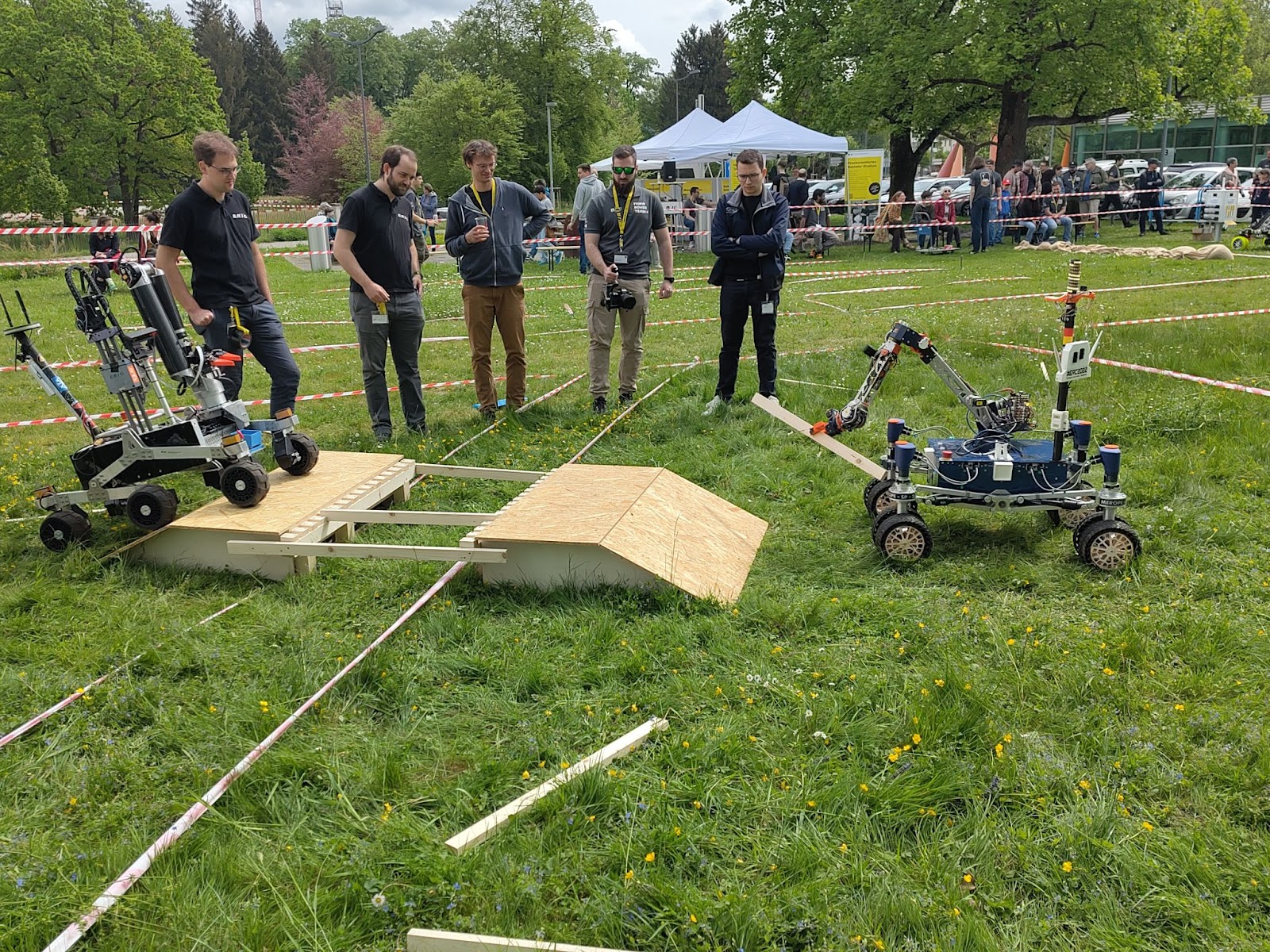
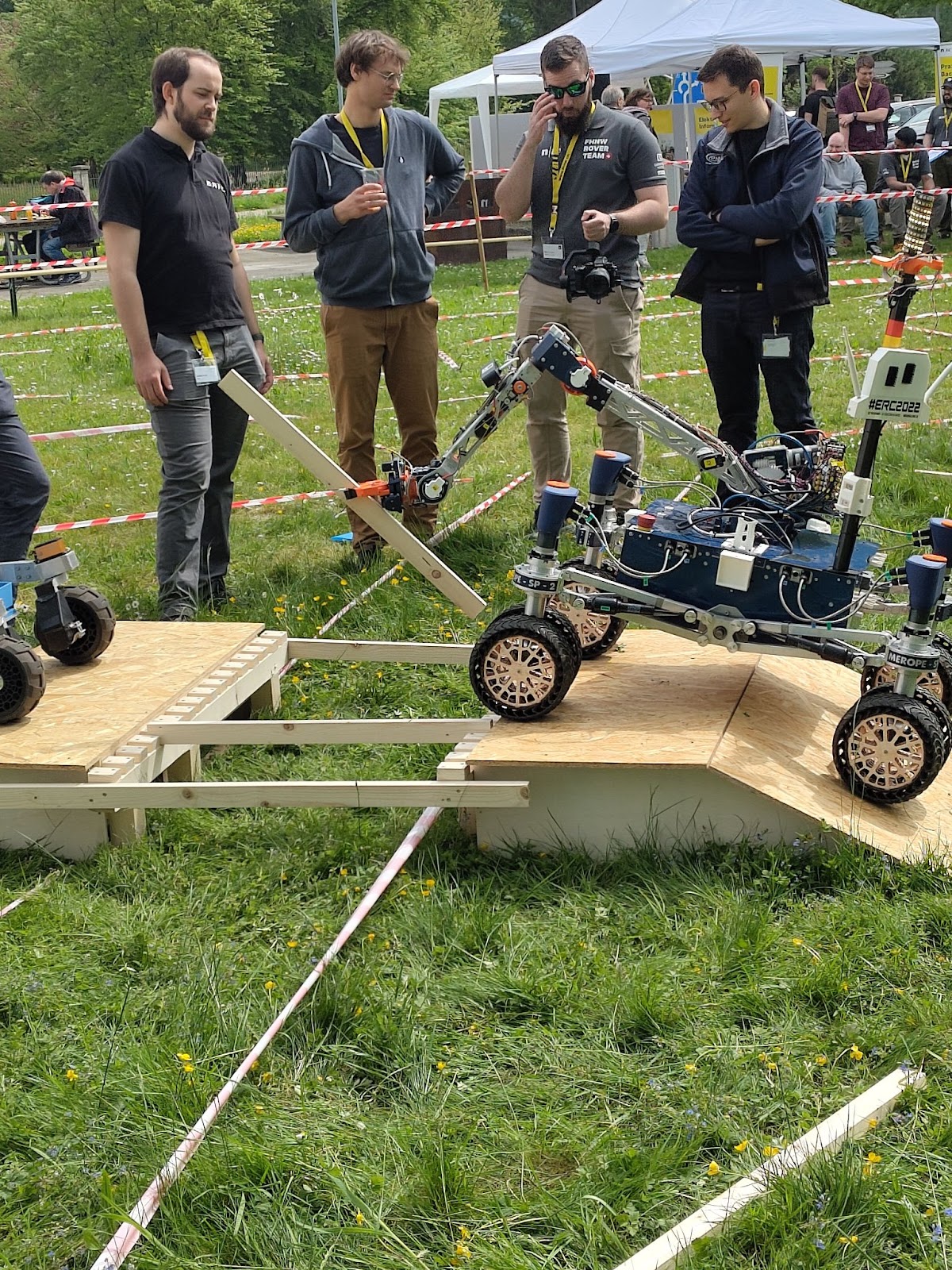
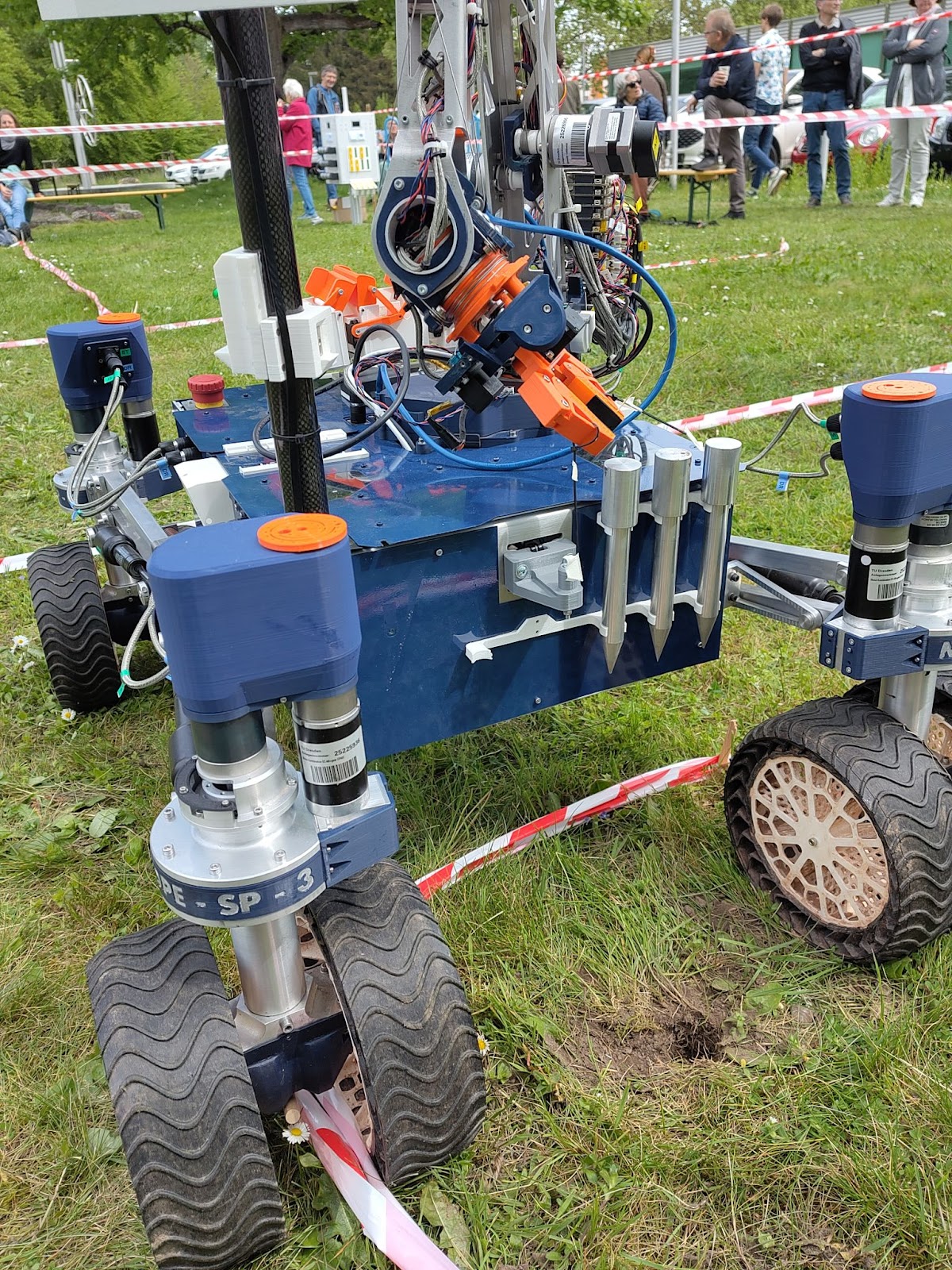
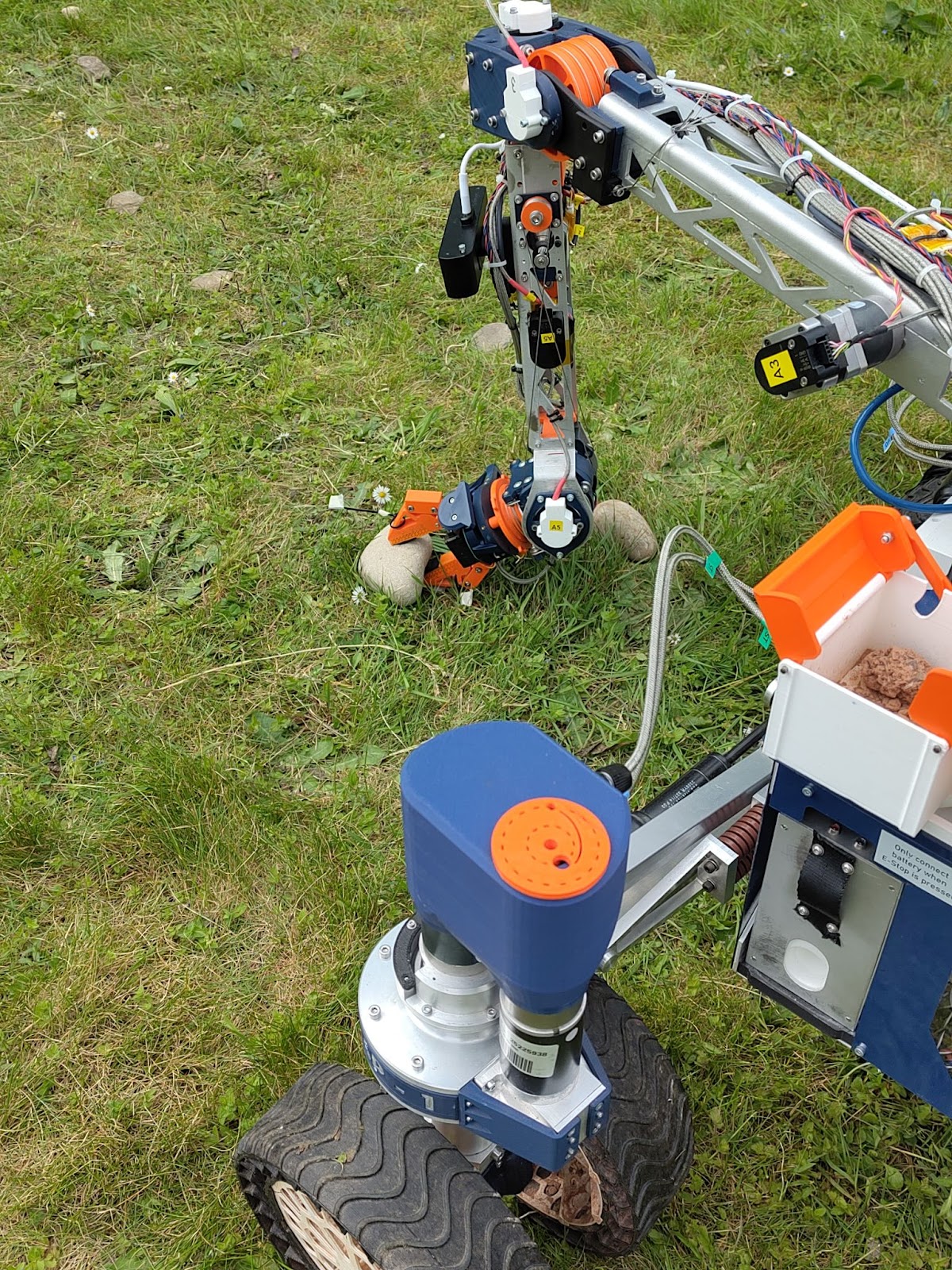
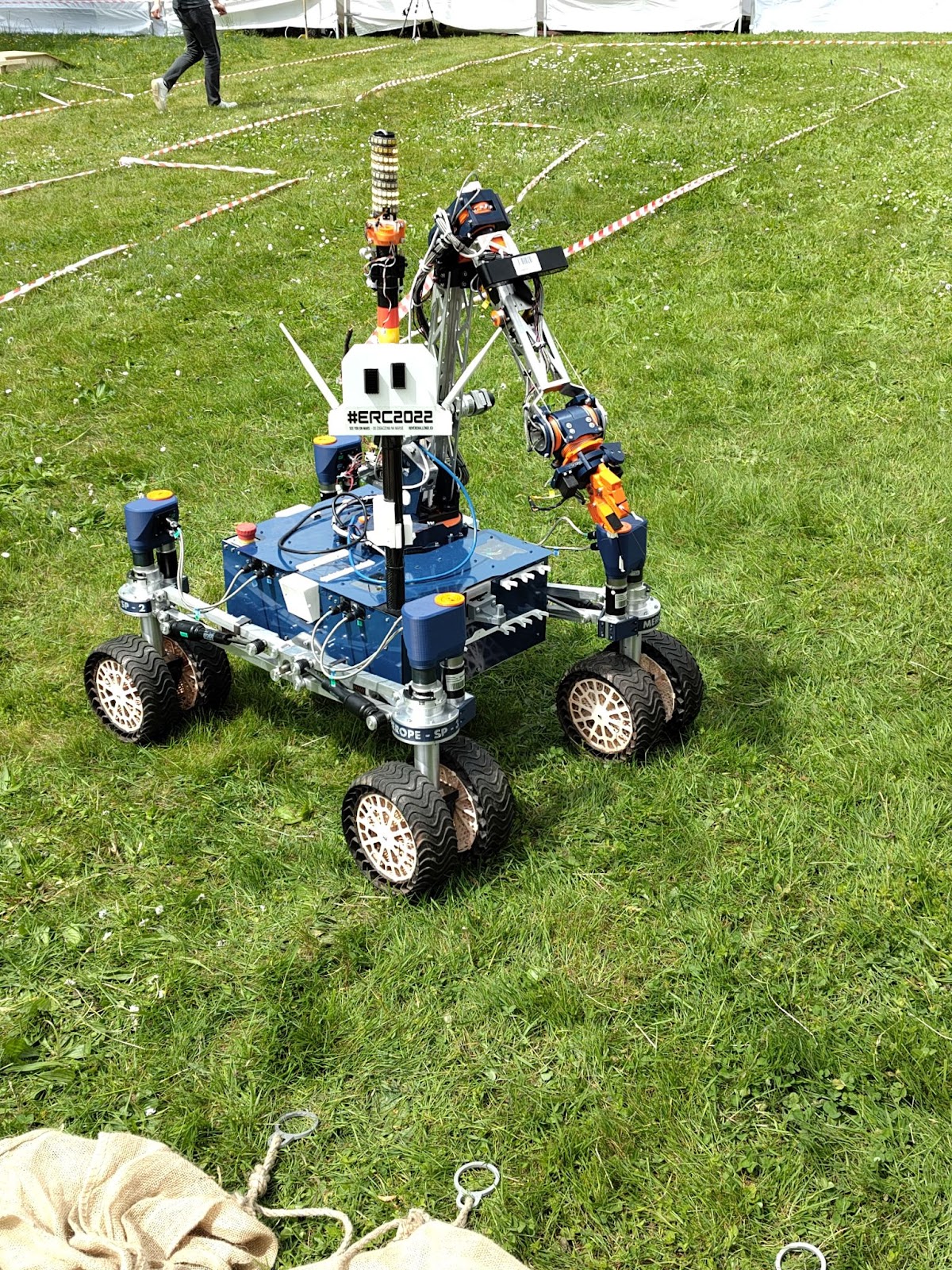
Das Hauptausstellungsstück an unserem Stand war der Rover Asterope. Mit ihm belegten wir im Herbst 2025 bei der European Rover Challenge den zweiten Platz. Zudem gewannen wir für die Aufgaben „Science Exploration“ und „Science Sampling“ jeweils den Task Award. Neben dem Rover stellten wir auch Teile unserer Rakete Dorado und weiterer Projekte aus.

Im Anschluss an die Konferenz fand am 11. April 2026 am selben Ort der Space Day München statt. Dazu war die interessierte Öffentlichkeit zu spannenden Aktivitäten und Vorträgen eingeladen. Wir nutzten unsere Anwesenheit, um uns auch dort zu präsentieren. Mit einem zweiten Rover boten wir zudem ein Mitmachangebot für Kinder an.
Anreise und Aufbau
Die Vorbereitungen für die Konferenz begannen bereits eine Woche zuvor. Wir stellten die geplanten Ausstellungsstücke aller Projekte zusammen und bereiteten sie für die Reise vor. Am Morgen des 7. April, einen Tag vor Konferenzbeginn, luden wir alle Exponate in den Transporter und fuhren nach München. Nach der Ankunft auf dem neuen TUM Campus Ottobrunn, dem Veranstaltungsort des SSEA, begannen wir mit dem Standaufbau. Am Nachmittag war alles für die folgenden vier spannenden Tage vorbereitet.

SSEA
Tag 1: Mittwoch
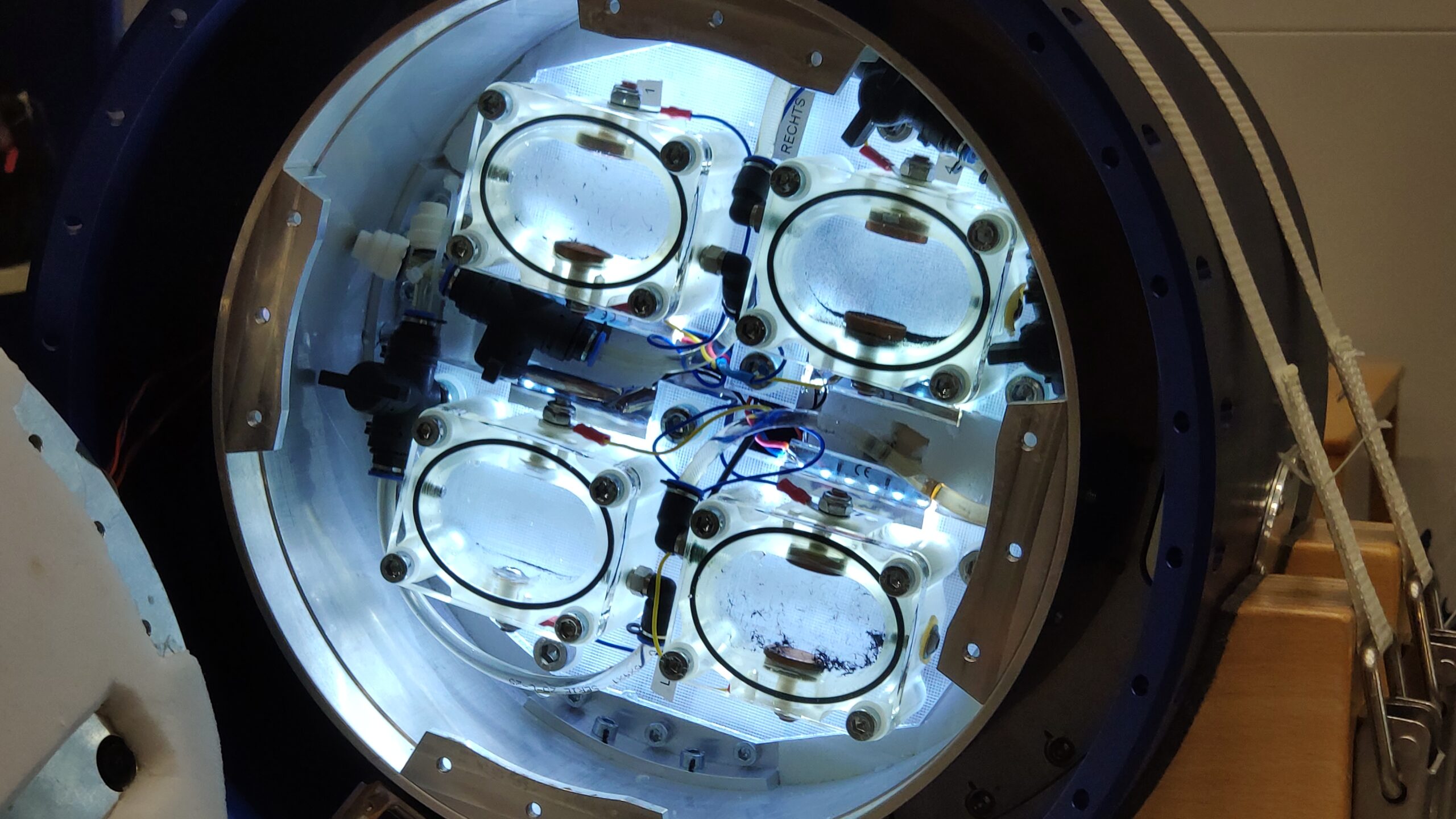
Am Morgen des 8. April versammelten sich alle Konferenzteilnehmenden am Veranstaltungsort. Nach den Eröffnungsreden begab sich unsere vierköpfige Vertretung aus Dresden direkt an den Stand. Schon kurze Zeit später zog dieser zahlreiche interessierte Gäste an. Die Gespräche über unsere Projekte und viele weitere Themen bereiteten uns große Freude. Hauptattraktion war der Rover Asterope. Interessierte konnten auch einen Blick ins innere des Rover werfen und die vom Roverteam eigenständig entwickelte Elektronik in Augenschein nehmen.

Der Andrang am Stand hielt über den gesamten Tag an. Besonders in den Vortragspausen herrschte reger Betrieb. Das Interesse an Projekten wie der Rakete Dorado, dem Triebwerk Titan und CASTOR (stellvertretend für unsere REXUS/BEXUS-Experimente) war für uns bereits an Tag 1 eine schöne Bestätigung für die geleistete Arbeit in allen Projekten.
Am Nachmittag des ersten Konferenztages standen Besuche bei verschiedenen Firmen und Forschungsinstitutionen der Münchner Raumfahrtbranche auf dem Programm. Dabei konnten wir unter anderem einen unter anderem einen originalen Sojus-Raumschiff-Simulator, mit dem z.B. ISS-Docking-Manöver simuliert werden können, sowie den Raketentriebwerksprüfstand der TUM am Flughafen Oberpfaffenhofen besichtigen. Nach diesen Besuchen endete der ereignisreiche erste Tag.
Tag 2: Donnerstag
Am zweiten Veranstaltungstag nahmen wir die Gelegenheit wahr, den Vorträgen zu den eingereichten wissenschaftlichen Arbeiten beizuwohnen. Da der Andrang am Stand etwas nachgelassen hatte, konnte immer ein Teil unseres Teams das Konferenzprogramm wahrnehmen. Zudem knüpften wir bei Besuchen an anderen Ständen wertvolle Kontakte.
Am frühen Nachmittag fand ein spannendes Panel mit Industrievertretern zum Thema „Space Engineer of the Future“ statt. Der Nachmittag klang mit weiteren Besuchen an unserem Stand sowie einem gemeinsamen Gruppenbild der Konferenzteilnehmenden aus. Das Highlight des zweiten Tages sollte aber am Abend noch folgen.

Wie es die Tradition der SSEA-Konferenzen verlangt, gab es auch diesmal einen Galaabend. Dazu lud der Freistaat Bayern als Sponsor der Konferenz alle Teilnehmenden in den Kaisersaal der Münchner Residenz ein. Der Abend begann mit einigen Reden und einem spannenden Impulsvortrag von Michaela Benthaus. Sie berichtete von ihrer Erfahrung, als erste querschnittgelähmte Person überhaupt ins All zu fliegen – wenn auch nur für einige Minuten im Rahmen eines suborbitalen Fluges mit einer Raumkapsel von Blue Origin. Anschließend konnten wir uns bei einem Empfang mit Essen und Getränken mit den anderen Konferenzteilnehmenden austauschen und viele spannende Gespräche führen. Den Abend ließen wir schließlich in einer Bar in der Münchner Innenstadt ausklingen.

Tag 3: Freitag
Am letzten Tag der Konferenz hatte die STAR neben dem Stand noch einen weiteren Auftritt auf der Konferenz. Unser Vereinsmitglied Ivan V. Nazarenko präsentierte in einem Fachvortrag sein Paper. Es trägt den Titel „Lessons Learned on the Verification of Explosively Actuated Valves for Use in a Pressure-fed Bi-liquid Sounding Rocket“ und wird in den offiziellen Conference Proceedings veröffentlicht. Der Beitrag behandelt die Lehren aus der Entwicklung und Erprobung von Pyroventilen für das Projekt „Dorado“, das die Entwicklung einer Flüssigtreibstoffrakete für die EUROC 2027 zum Ziel hat.
Im Nachgang des Vortrags besuchten mehrere Interessierte unseren Stand, um die ausgestellten Ventile zu betrachten. Dadurch ergaben sich zusätzliche Fachgespräche, in denen Funktionsweise, Testverfahren und technische Hintergründe deutlich ausführlicher und anschaulicher erläutert werden konnten, als es im Rahmen des achtminütigen Vortrags möglich gewesen wäre.
Am Nachmittag des dritten Tages neigte sich die Konferenz dem Ende zu. Es fand ein Panel zur Verbindung von Ausbildung und Berufseinstieg in der Raumfahrt statt. Daran nahm auch die erste Vorsitzende des Bundesverbandes Studentischer Raumfahrt (BVSR e. V.) teil, dessen Gründungsmitglied die STAR ist. Abschließend folgten einige Reden, und die Organisatoren dieser großartigen Konferenz wurden mit gebührendem Applaus gewürdigt. Wir bedanken uns herzlich bei den Organisatorinnen und Organisatoren für die Möglichkeit, die STAR Dresden beim SSEA mit einem eigenen Stand zu präsentieren.
Space Day München
Wie anfangs erwähnt, fand am Samstag direkt nach der Konferenz der Space Day München statt. Dieser wird jährlich vom Yuri’s Night e.V. anlässlich des ersten bemannten Weltraumflugs von Yuri Gagarin ausgerichtet. Den gesamten Nachmittag über konnten Kinder an verschiedenen Mitmachaktionen teilnehmen oder gemeinsam mit ihren Familien verschiedenen Vorträgen zuhören.

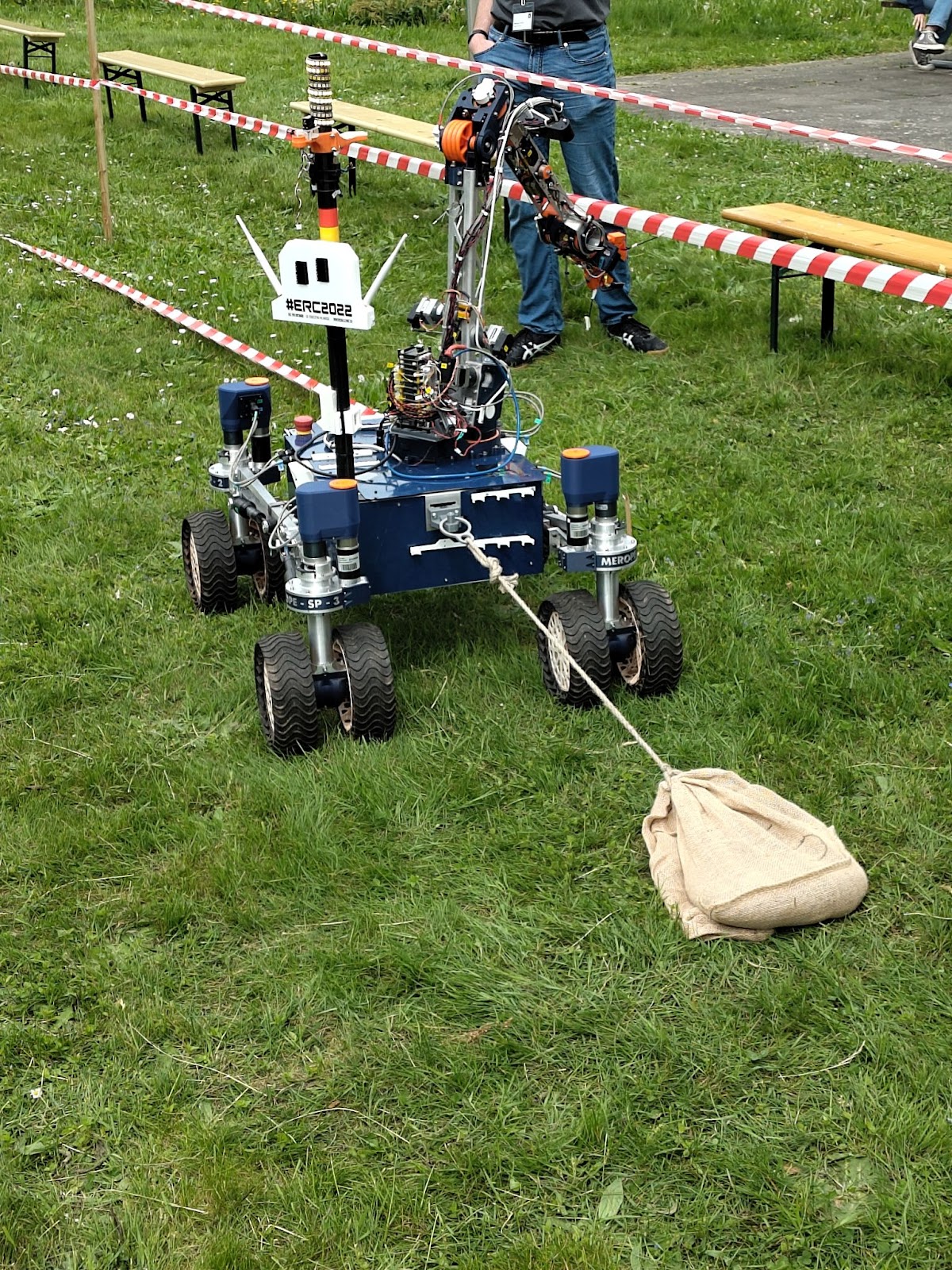
Da wir schon vor Ort in München waren, nahmen wir die Einladung gerne an, einen Tag länger zu bleiben und auf dem Space Day auszustellen. Zusätzlich zu Asterope bauten wir an diesem Tag unseren zweiten Rover auf. Merope, unser ERC-Rover aus dem Jahr 2022 und aktueller „Messe“-Rover, bot Kindern und Erwachsenen die Gelegenheit, selbst einmal einen Rover zu steuern. Über den gesamten Tag hinweg kam so eine Vielzahl an Kindern mit spannender Technik in Berührung. Die Begeisterung der Kinder und die vielen tollen Interaktionen bereiteten uns große Freude.

Auch am Stand herrschte durchgehend reger Betrieb, und das Interesse der Gäste an unseren Projekten war groß. Zwischendurch hatten wir, gemeinsam mit anderen studentischen Vereinen, die Möglichkeit, uns in einem kurzen Vortrag zu präsentieren.
Abbau und Rückreise
Am Abend gingen vier spannende und interessante Tage für uns zu Ende. Vom ersten Tag an hat der Austausch auf Augenhöhe mit den anderen Konferenzteilnehmern viel Spaß gemacht. Wir konnten viele neue Kontakte knüpfen und bestehende Netzwerke pflegen. Zudem haben wir die exzellente studentische Forschung an der TU Dresden einem breiten Publikum zeigen können. Ein besonderes Highlight war der Samstag, an dem wir durch unseren Rover bei den Kindern Begeisterung für Weltraumtechnik wecken und fördern konnten. Nach dem Ende der Veranstaltung bauten wir unseren Stand ab und verstauten die Exponate wieder im Transporter. Am Sonntag ging es dann für uns alle zurück nach Dresden.
Zum Abschluss dieses Berichts möchten wir uns noch herzlich bei der Deutschen Gesellschaft für Luft- und Raumfahrt e.V. für den Zuschuss zu den Transportkosten bedanken. Ohne die Unterstützung wäre ein derart umfangreicher Auftritt unseres Vereins samt Präsentation unseres preisgekrönten Rovers Asterope nicht möglich gewesen. Zudem danken wir der Gesellschaft von Freunden und Förderern der TU Dresden e. V. für die Übernahme der Teilnahmekosten an der Konferenz.





























































































")







































































































